Deep Soft Procrustes for Markerless Volumetric Sensor Alignment
Mar 25, 2020·,, ,,·
1 min read
,,·
1 min read
Vladimiros Sterzentsenko
Alexandros Doumanoglou
Spyridon Thermos
Nikolaos Zioulis
Dimitrios Zarpalas
Petros Daras
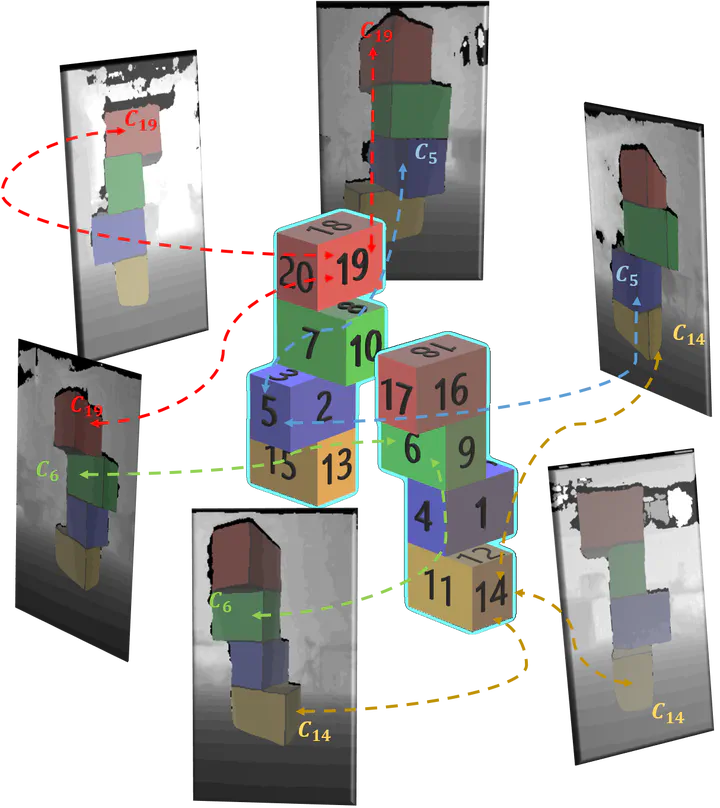 Data-driven correspondence establishment using a volumetric marker.
Data-driven correspondence establishment using a volumetric marker.Abstract
With the advent of consumer grade depth sensors, low-cost volumetric capture systems are easier to deploy. Their wider adoption though depends on their usability and by extension on the practicality of spatially aligning multiple sensors. Most existing alignment approaches employ visual patterns, e.g. checkerboards, or markers and require high user involvement and technical knowledge. More user-friendly and easier-to-use approaches rely on markerless methods that exploit geometric patterns of a physical structure. However, current SoA approaches are bounded by restrictions in the placement and the number of sensors. In this work, we improve markerless data-driven correspondence estimation to achieve more robust and flexible multi-sensor spatial alignment. In particular, we incorporate geometric constraints in an end-to-end manner into a typical segmentation based model and bridge the intermediate dense classification task with the targeted pose estimation one. This is accomplished by a soft, differentiable procrustes analysis that regularizes the segmentation and achieves higher extrinsic calibration performance in expanded sensor placement configurations, while being unrestricted by the number of sensors of the volumetric capture system. Our model is experimentally shown to achieve similar results with marker-based methods and outperform the mark-erless ones, while also being robust to the pose variations of the calibration structure. Code and pretrained models are available at
.
Type
Publication
In 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR)
Click the Cite button above to copy/download publication metadata (*.bib).